

 BTC/HKD-1.4%
BTC/HKD-1.4% ETH/HKD-1.97%
ETH/HKD-1.97% LTC/HKD+0.5%
LTC/HKD+0.5% DOT/HKD-1.47%
DOT/HKD-1.47% ADA/HKD-2.08%
ADA/HKD-2.08% SOL/HKD-2.65%
SOL/HKD-2.65% XRP/HKD-2.34%
XRP/HKD-2.34% DOGE/US-0.59%
DOGE/US-0.59%報告出品方:廣發證券
以下為報告原文節選
------
一、機器之關節,旋轉傳動的紐帶
連接動力源和執行機構,下游應用廣
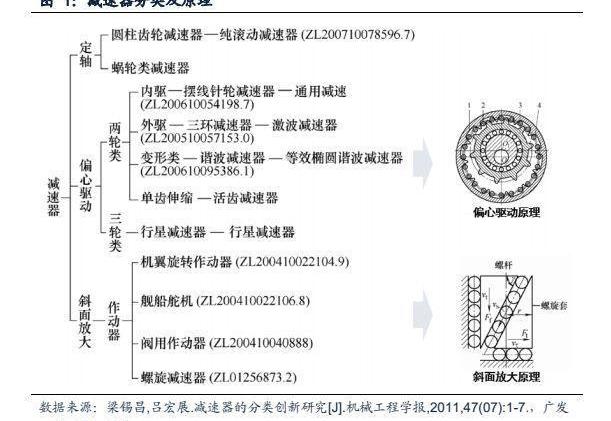
在機械傳動領域,減速器是連接動力源和執行機構之間的中間裝置。減速器的發展已有數百年的歷史并發展出多種減速器形式。已經成熟并已標準化的產品有圓柱齒輪、蝸輪、行星齒輪、擺線針輪減速器和諧波等;已經提出并正在推廣的產品有三環、活齒減速器等。
從結構上減速器分為定軸傳動、偏心驅動、斜面放大三大類。其中偏心驅動的減速原理是利用具有相對運動的、存在度量差的兩運動件的微差累積來實現減速器的力矩放大和低速輸出,具有少齒差轉動特征,包括變形類的諧波減速器、多齒的行星減速器等;斜面放大則是通過連續旋轉的斜面將沿斜面運動的圓周力在其正交方向放大,從而將旋轉運動轉變為直線運動,包括滾珠絲杠等。


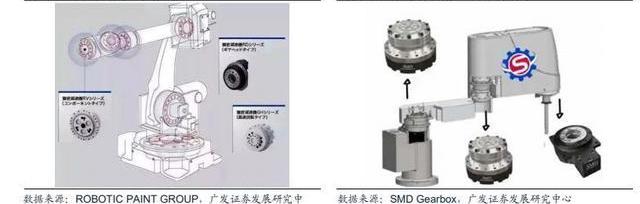
減速機廣泛應用于國民經濟各領域,不同產品下游有所差異。諧波和RV減速器主要應用于工業機器人領域,同時部分應用于非標自動化、機床、半導體等精密制造行業;齒輪、擺線針輪等通用減速器則更廣泛應用于環保、建筑、電力、化工、食品等工業領域。

Cobo Argus上線DeFi挖礦自動撤退機器人:8月10日消息,Cobo 機構級 DeFi 投資管理平臺 Cobo Argus 現已上線 Withdrawal Bot(自動撤退機器人)功能,用戶可以自定義風險指標如 LP Token 權重、Deposit Ratio(存款占比)、TVL 波動范圍,通過監測鏈上實時數據,在協議觸發用戶設定的指標,如 TVL 驟降或 LP Token 占比暴漲等危險信號時,機器人將幫助投資者自動撤出資金。[2023/8/10 16:18:04]
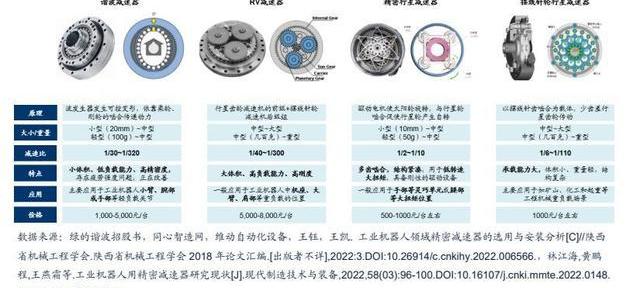
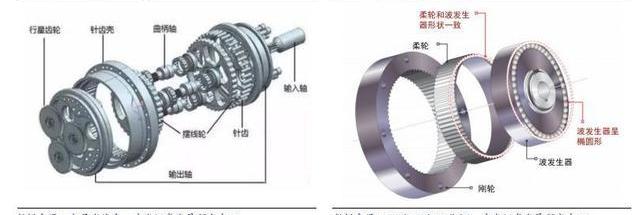
機器人常用減速器包括諧波、RV、行星齒輪、擺線針輪減速器,減速器選擇需要綜合考慮體積、減速比、扭矩和價格因素。諧波減速器:利用柔輪、剛輪和波發生器的相對運動減速,波發生器發生可靠形變后,依靠柔輪、剛輪的嚙齒傳遞動力。特點為小體積、低負載能力、高精密度,用在工業機器人小臂、腕部等輕負載關節,代表企業綠的諧波。RV減速器:由漸開線圓柱齒輪行星減速前級和擺線針輪行星減速后級兩部分構成,漸開線行星齒輪與曲柄軸連接成一起作為擺線針輪傳動部分的輸入,曲柄軸帶動擺線輪作偏心運動。其特點為大體積、高負載能力、高剛度,但價格昂貴,用在工業機器人機座、大臂等重負載的位置,代表企業雙環傳動。行星齒輪減速器:精密行星減速器在運行過程中一個太陽輪有多個行星輪繞轉,所以其體積小、質量較輕,相較于其他減速器啟動更加平穩,且剛性、精度和扭矩高。其特點為結構緊湊、低轉速大扭矩、價格便宜但減速比低,精密行星減速器用在直角坐標工業機器人,也可以用在人形機器人小型關節或者運動關節領域,代表企業為中大力德、兆威機電。
擺線針輪行星減速器:以應用行星式傳動為基礎、以擺線針齒嚙合為載體的傳動裝置。其特點為承載能力大,而相對于RV減速器價格更低,常用在礦山、化工等重負載領域,在部分機器人領域也有所推廣。
慢霧:Transit Swap黑客攻擊交易被搶跑,套利機器人獲利超100萬美元:10月1日消息,據慢霧安全團隊情報,Transit Swap 黑客轉移用戶 BSC 鏈 BUSD 資產時被套利機器人搶跑,區塊高度為21816885,獲利107萬BUSD。套利機器人相關地址列表如下:0xa957...70d2、0x90b5...8ff4、0xcfb0...7ac7、
截止到目前,在各方的共同努力下,黑客已將 70% 左右的被盜資產退還到Transit Swap開發者地址,建議套利機器人所屬人同樣通過service@transit.finance或鏈上地址與Transit Swap取得聯系,共同將此次被盜事件的受害用戶損失降低到最小。[2022/10/2 18:37:44]
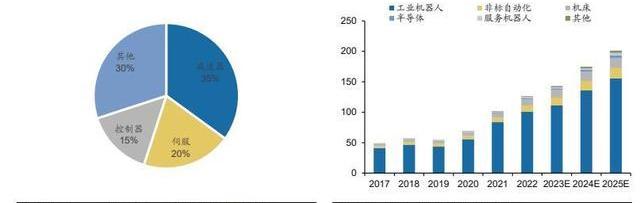
減速器是工業機器人核心零部件之一
控制器、伺服電機和減速器是工業機器人的三個核心部件,從技術上決定了工業機器人的關鍵特性,如工作精度、負載、使用壽命、穩定性和可靠性,根據ResearchInChina數據,它們合計約占工業機器人成本的70%,其中減速機占35%,伺服電機占20%,控制器占15%。一般來說,機器人的每個關節都需要配置一臺減速器。根據綠的諧波招股書,每臺六軸多關節機器人需要搭配6臺精密減速器,其中負載10kg以下機器人主要使用諧波減速器;10-20kg及更高負載的機器人小臂、手腕關節可以采用諧波減速器,其余關節采用RV減速器。協作機器人全部關節使用諧波減速器,一般使用6-7個諧波減速器。SCARA機器人一般使用2-3臺諧波減速器。DELTA機器人一般使用3臺諧波減速器,可實現分揀等功能。
機器人索菲亞進入Algorand生態,將每年產出NFT藝術品:據官方信息,10月18日,漢森機器人技術公司首席執行官、機器人專家David Hanson宣布,在10月10日蘇富比秋季當代藝術拍賣會上,已出售機器人索菲亞的新藝術品,名叫《面對奇點的索菲亞》。這既是實物藝術品,也是隨著時間推移而演變的數字作品,每年將生成一次數字繪畫NFT。該藝術品起拍價為380萬港幣,無國界資本最終以501.5萬港幣拍下了該作品。所有收益都將繼續用于索菲亞的人工智能和創意開發,以及社區及教育推廣。
Hanson補充道,“我們特別高興該藝術品最終花落無國界資本,很期待在Algorand上鑄造索菲亞NFT。能將Algorand區塊鏈技術與索菲亞整合,這將對數字藝術和人工智能的發展產生積極影響。Algorand作為當今唯一的負碳區塊鏈,和我們的環保價值觀相吻合。這是索菲亞對外發展以及SophiaDao啟動的重要一步,讓公眾能接觸到索菲亞,并將新興技術、人工智能、藝術社區相結合。通過索菲亞藝術和科學,我們將不斷支持那些有助于解決我們這個時代的挑戰、改善今天和未來生活的偉大思想和新興技術。”[2021/10/20 20:42:05]
人形機器人關節驅動模式影響減速器選擇
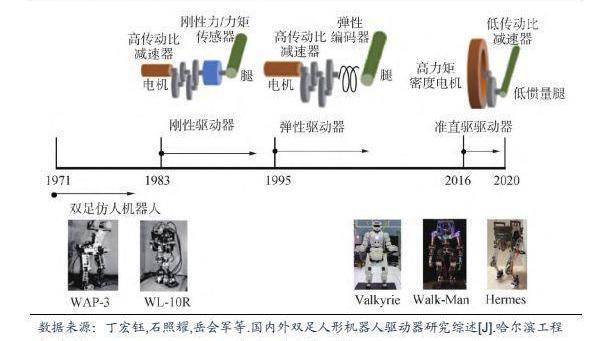
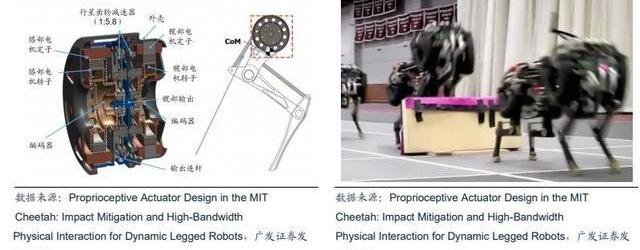
機器人電驅可以分為剛性驅動、彈性驅動和準直驅驅動等不同模式。雙足人形機器人關節運特點和人類類似,如運動速度快,機動性能好,步幅和步頻變化,高速碰撞等。這些運動特點要求驅動器具有高功率密度、高響應性、高能量利用效率和耐沖擊性等特性。為提高驅動器該類特性,逐漸發展出三類主流路線。1983年,早稻田大學研究的WL10R機器人使用剛性驅動器TSA(traditionalstiffnessactuator),自此雙足人形機器人開始廣泛應用剛性驅動器為關節動力源。剛性驅動發展歷史長、技術成熟度高,但是由于元器件工藝和原理上的限制,傳統剛性驅動器的功率密度很難達到生物肌肉的水平500W/kg,同時也解決不了機器人受外部沖擊時零部件強度問題,繼而產生了其他技術路線。1995年,麻省理工學院的Pratt等提出了彈性驅動器SEA(serieselasticactuator)的概念,并在美國宇航局的機器人Valkyrie和意大利技術研究院的機器人Walk-Man上得到應用,彈性驅動器模擬肌肉系統功能,使關節表現出柔順、安全和高能量效率特性。2016年,Wensing等提出了準直驅驅動器PA(proprioceptiveactuator),并將其應用于四足機器人Cheetah和雙足機器人Hermes,準直驅驅動采用電機加低傳動比減速器的方案,負載傳導路徑更加簡單,具有功率密度高,力控帶寬大,抗沖擊能力強等優點,準直驅驅動器成為最近幾年研究的熱點。
OpeaSea機器人可能會影響拍賣:OpenSea拍賣系統似乎正在被機器人利用。以太坊錢包似乎以驚人的速度取消訂單,使用 OpenSea 合約的最后一千筆交易中有超過四分之一被取消。
行業研究員Mike Dudas表示,機器人在被接受但在執行之前取消競價,把系列+版本的價格越來越低;然后在買漲后拉動相反的動作來引誘價格走高。據一位知名的Solidity開發人員稱,機器人會觀察是否有人會接受他們的出價,然后通過取消出價來提前運行,因此接受失敗。(Bein Crypto)[2021/8/12 1:51:01]
不同驅動模式架構和特性不同,進而影響減速器等零部件的選型:
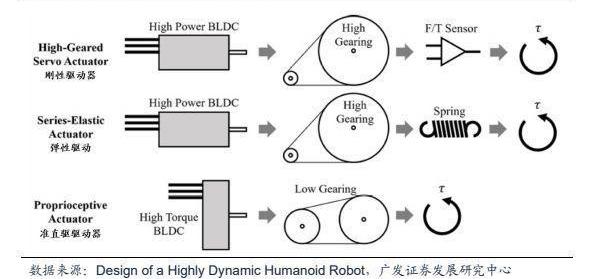
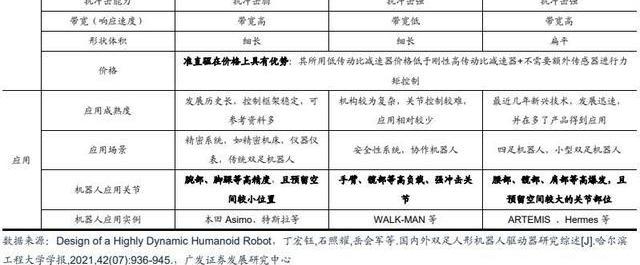
剛性驅動:①組成:一般采用高速電機+高傳動比減速器+高剛性力矩傳感器模式,諧波減速器憑借高減速比、重量輕、緊湊高效的特征獲得青睞,力/扭矩傳感器放置于關節末端進行感知控制。②特點:傳動比大+轉速低+扭矩密度高,因而具有更高的可控制精度,但是傳統剛性驅動器的功率密度很難達到生物肌肉的水平,同時也解決不了機器人受外部沖擊時零部件強度問題,適用于緩慢且相對靜態的運動。③應用:發展歷史長,控制框架穩定,本田Asimo、特斯拉人形機器人均采用該方案;同時,剛性驅動更為適配于腕部、腳踝等高精度,且預留空間較小位置。彈性驅動:①組成:在剛性驅動器的基礎上加入彈性體來增加機器人行走、奔跑、跳躍等運動能力,包括串聯、并聯、多模態等眾多模式。②特點:類比于動物利用剛柔并濟的肌肉骨骼系統在運動過程中儲存/釋放能量并實現緩沖,彈性驅動器使關節表現出柔順安全、高能量效率、強抗沖擊性的特性;但是較低的剛度會影響帶寬,進而降低響應速度并增加控制難度。③應用:機構較為復雜,關節控制較難,常用語高負載、強沖擊等特殊場景,如意大利技術研究院為解決救災機器人跌落和與環境的碰撞問題,設計了彈性驅動器,并應用于WALK-MAN機器人的手臂,具有較好的負載能力和抗沖擊能力。準直驅驅動:①組成:一般采用高扭矩密度電機+低傳動比減速器方案,常采用低轉速大扭矩的扁平化的力矩電機和低傳動比且結構緊湊的行星齒輪減速器;同時,電流可以作為力矩的測量方式,因而不需要配置力矩傳感器。②特點:傳動比小+轉速高+功率密度高,因為更為高效并具有更強的爆發力,同時準直驅在價格上具有優勢,其所用低傳動比減速器價格低于剛性高傳動比減速器,且不需要額外傳感器進行力矩控制;③應用:最近幾年新興技術,發展迅速,并在四足機器人和ARTEMIS、Hermes等雙足機器人也有所應用,該類機器人更善于運動;同時,準直驅驅動更為適配于腰部、髖部、肩部等高爆發,且預留空間較大的關節部位。
動態 | 機器人藝術家的創作過程被記錄在區塊鏈上:據Cryptovibes消息,俄羅斯機器人公司Robonomics Network制造了一個叫做Gaka-Chu的機器人,這個機器人擅長寫日語中的漢字,也能創作一些簡單的畫。Gaka-Chu建立在基于以太坊的解決方案上,允許與機器人之間建立智能合約,創作全過程和質量控制記錄都被記錄在區塊鏈上,可用于追溯創作過程,也可以用于分析消費者需求。[2019/1/18]

1.剛性驅動器:高扭矩密度+高精度,可執行復雜任務但爆發力不足
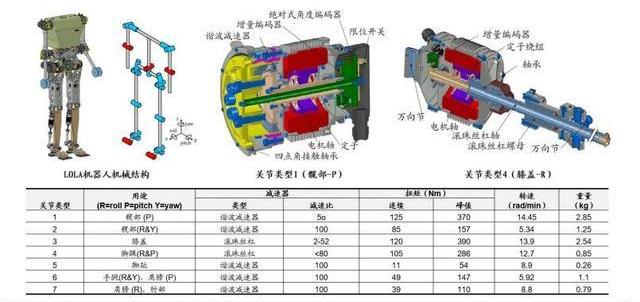
剛性驅動器在特斯拉人形機器人、本田Asimo機器人、慕尼黑工大LOLA機器人,特點為力矩密度大,力量控制精準,可以像人一樣執行復雜任務,但運動速度普遍較低,爆發力不足。特斯拉人形機器人身高1.72m體重56kg,共有40個主動自由度和6類執行器,實際可舉起68kg的物體,運動速度為8km/h,并能執行收拾杯盤等復雜任務,可以做到精準力矩控制,如碰撞到雞蛋不會打碎。其采用直線、旋轉兩類執行器,其中旋轉執行器為剛性結構,采用力矩電機+諧波減速器+位置/扭矩傳感器方案,旋轉執行器分為三種類型,其中之一扭矩達180Nm,僅重2.26kg,扭矩密度達80Nm/kg。本田Asimo機器人推出于2000年,身高1.30m體重50kg,共有57個自由度,單手抓力0.5kg,跑步速度為7km/s。Asimo可以進行面部、聲音的識別,具備敏捷的運動能力,可以向前跑步、向后退、單/雙腿跳躍,并能靈活地適應不斷變化的外部情況,如在不平坦的表面上行走;在執行任務方面,可以做到拿起玻璃瓶并擰開蓋子,或進行復雜手語表達。Asimo執行器采用伺服電機+諧波減速器的方案,并配有六力傳感、加速度、陀螺儀等多個傳感器。LOLA人形機器人推出于2006年,可以進行類似于人的步行運動,身高1.80m,共有22個自由度和7類執行器,運動速度5km/h。LOLA在膝蓋和腳踝采用滾柱絲杠線性執行器,特點為無間隙、無啟動扭矩、可反向驅動和靜音運行,并將大部分執行器的質量轉移到靠近臀部的位置,從而優化大腿的慣量;其余關節采用諧波減速器的剛性傳動方案,其髖部關節連續扭矩為125Nm,重量2.85kg,扭矩密度44Nm/kg,具有重量強、扭矩大的特點;同時,每個關節配有位置傳感器、角度編碼器、增量編碼器,其關節特點為高速狀態下良好的動態性能、緊湊集約以及高效率。

2.彈性驅動器:剛性驅動器基礎上的優化,提高抗沖擊能力
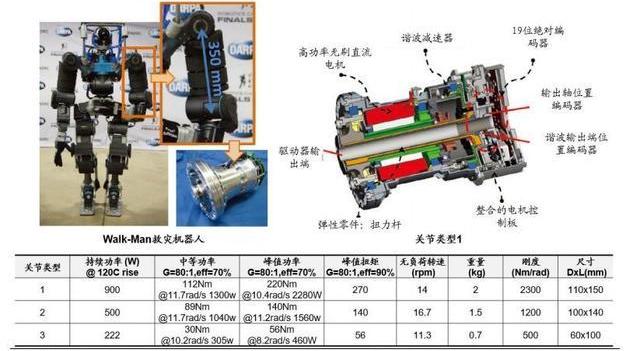
機器人在于環境相互作用中不可避免發生墜落事件,因此需要具備過載能力,在發生碰撞和跌到后能夠自我恢復。意大利技術研究院設計了新型的彈性驅動器,并應用于WALK-MAN機器人手臂,驅動器采用無框無刷直流電機+諧波減速器的模式,并在諧波減速器輸出端和驅動器輸出間設置了彈性零件扭力桿實現了防沖擊保護,并配有位置、扭矩、溫度傳感器。
3.準直驅驅動器:高功率密度和更好的抗沖擊能力,省去傳感器但半徑較大
準直驅驅動器依靠驅動器電機開環力控,不依賴于附加力或力矩傳感器,就可以本體感知機器人腳部和外界的交互力,也被稱為本體驅動器。驅動器有更高的功率密度,同時低傳動比減速器能夠更好將外部沖擊傳遞給電機,實現高帶寬力控和更好的抗沖擊能力。然而,大扭矩對電機的尺寸要求更為苛刻,電機呈現扁平化,執行器半徑更大。準直驅驅動器應用于MIT推出的Cheetah四足機器人以及UCLA推出的ARTEMIS人形機器人等。
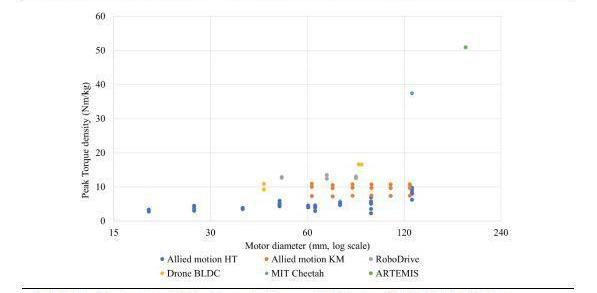
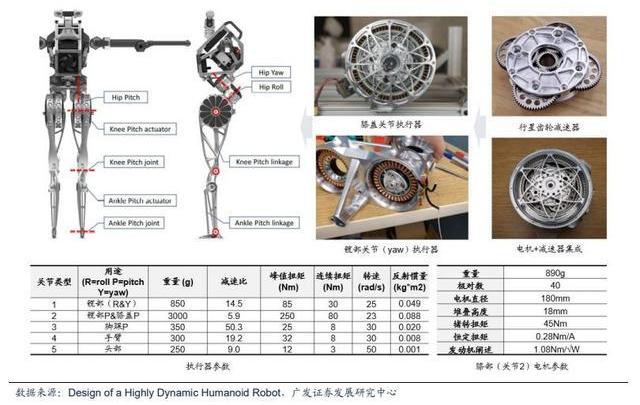
MIT的Cheetah四足機器人具備步行、跑步和跳躍能力,機器人的最高奔跑速度可達13.5m/s。此類行為涉及反復的高沖擊力和短暫的地面接觸時間,為了在如此短的時間內控制地面反作用力,系統必須具有高帶寬力控并能承受頻繁的高沖擊力。機器人采用準直驅執行器,定制設計大半徑的無框力矩電機,純電機扭矩密度達27Nm/kg;減速器選用減速比為5.8的單級行星齒輪減速器,低減速比提高動態運動能力;另外,機器人髖部和膝部的執行器同軸位于髖部,其中一個執行器直接驅動臀部,而另一個則通過平行連桿驅動膝蓋,旨在最大限度地減少質量和腿部慣性,從而最大限度地提高沖擊緩解系數。UCLA的ARTEMIS人形機器人身高1.42cm,體重37kg,行走速度2.1m/s,共有20個自由度和5種類型執行器,能夠在粗糙和不穩定的表面上行走,在外部撞擊中能保持平衡,跌到后重新站起,以及具備跑步、跳躍、足球運動等能力。機器人髖部/膝部P軸執行器采用寬大氣隙電機+行星齒輪減速器方案,執行器總重量3kg,連續扭矩80Nm,扭矩密度27Nm/kg。機器人腿部低反射慣性和高傳輸透明度可以使得機器人能夠本體感知力控,并在跑步和跳躍中降低沖擊力。
---報告摘錄結束更多內容請閱讀報告原文---
報告合集專題一覽X由定期整理更新
精選報告來源:報告派
科技/電子/半導體/
人工智能|Ai產業|Ai芯片|智能家居|智能音箱|智能語音|智能家電|智能照明|智能馬桶|智能終端|智能門鎖|智能手機|可穿戴設備|半導體|芯片產業|第三代半導體|藍牙|晶圓|功率半導體|5G|GA射頻|IGBT|SICGA|SICGAN|分立器件|化合物|晶圓|封裝封測|顯示器|LED|OLED|LED封裝|LED芯片|LED照明|柔性折疊屏|電子元器件|光電子|消費電子|電子FPC|電路板|集成電路|元宇宙|區塊鏈|NFT數字藏品|虛擬貨幣|比特幣|數字貨幣|資產管理|保險行業|保險科技|財產保險|機器人
美國FTC上訴失敗,微軟收購動視暴雪離終點線更近一步北京時間7月15日晚間消息,美國一家上訴法院周五駁回了聯邦貿易委員會關于暫停微軟對動視暴雪收購交易的請求.
1900/1/1 0:00:00編輯|國際能源網/儲能頭條團隊 國際能源網/儲能頭條為您精選一周內國內外儲能代表性的事件并闡述自己的觀點,如有不同意見,歡迎讀者朋友在文末“寫留言”處,與我們互動、交流、探討.
1900/1/1 0:00:00來源:證券時報 本公司董事會及全體董事保證本公告內容不存在任何虛假記載、誤導性陳述或者重大遺漏,并對其內容的真實性、準確性和完整性依法承擔法律責任.
1900/1/1 0:00:001.馬斯克宣布成立人工智能公司xAI當地時間7月12日,馬斯克在社交媒體上宣布,他領導的團隊正式成立xAI公司.
1900/1/1 0:00:00“楊平主動投案時只承認了自己的小部分受賄事實,對其他的違法行為有所保留,妄圖蒙混過關,換一個‘從寬處理’……”日前,廣西壯族自治區鳳山縣召開干部警示教育大會.
1900/1/1 0:00:00PiNetwork一直未上主網的原因可以歸結為以下幾個方面:1.技術開發和測試:PiNetwork是一個龐大的區塊鏈項目,需要進行全面的技術開發和測試,以確保網絡的安全性、穩定性和可擴展性.
1900/1/1 0:00:00


